Geometry¶
Design Philosophy¶
The geometry category provides the ability to describe a geometrical structure and propagate particles efficiently through it. This is done in part with the aid of two central concepts, the logical and physical volumes. A logical volume represents a detector element of a given shape which may contain other volumes, and which may have other attributes. It has access to other information which is independent of its physical location in the detector, such as material and sensitive detector behaviour. A physical volume represents the spatial positioning or placement of the logical volume with respect to an enclosing mother (logical) volume. Thus a hierarchical tree structure of volumes can be built with each volume containing smaller volumes (which may not overlap). Repetitive structures can be represented by specialised physical volumes, such as replicas and parameterised placements, sometimes resulting in a large savings in memory.
In Geant4 the logical volume has been refined by defining the shape as a separate entity, called a solid. Solids with simple shapes, like rectilinear boxes, trapezoids, spherical or cylindrical sections or shells, each have their properties coded separately, in accord with the concept of Constructed Solid Geometry (CSG). More complex solids are defined for specific use, or having their surfaces approximated by facets (tessellated solids).
Another way to build solids is by Boolean combination - union, intersection and subtraction. The elemental solids should be CSGs.
Although a detector is naturally and best described as by a hierarchy of volumes, efficiency is not critically dependent on this. An optimisation technique, called voxelization, allows efficient navigation even in “flat” geometries, typical of those produced by CAD systems.
Class Design¶
G4GeometryManager - responsible for managing “high level” objects in the geometry subdomain, notably including opening and closing (“locking”) the geometry, and creating/deleting optimisation information for G4Navigator. The class is a “singleton”.
G4LogicalVolumeStore - a container for optionally storing created logical volumes. It enables traversal of all logical volumes by the UI/user/etc.
G4LogicalVolume - represents a leaf node or unpositioned subtree in the geometry hierarchy. It may have daughters ascribed to it, and is also responsible for retrieval of the physical and tracking attributes of the physical volume that it represents. These attributes include solid, material, magnetic field, and optionally user limits, sensitive detectors, etc. Logical volumes are optionally entered into the G4LogicalVolumeStore.
G4MagneticField - a class responsible for the magnetic field in each volume, including the calculation of particle trajectories along curved paths. In cases where the geometry step limits the particle’s step, the distance calculated is guaranteed to be the distance to a volume boundary.
G4Navigator - a class used by the tracking management, able to obtain/calculate tracking-time geometrical information such as distance to the next volume, or to find the physical volume containing a given point in the world reference system. The navigator maintains a transformation history and other information used to optimise the tracking time performance.
G4NavigationHistory - responsible for maintenance of the history of the path taken through the geometrical hierarchy. It is principally a utility class for use by G4Navigator.
G4NormalNavigation - a utility class for navigation in volumes containing only G4PVPlacement daughter volumes.
G4ParameterisedNavigation - a utility class for navigation in volumes containing a single G4PVParameterised volume for which voxels for the replicated volumes have been constructed.
G4VoxelNavigation - a utility class for navigation in volumes containing only G4PVPlacement daughter volumes for which voxels have been constructed.
G4ReplicaNavigation - a utility class for navigation in volumes containing a single G4PVParameterised volume for which voxels for the replicated volumes have been constructed.
G4PhysicalVolumeStore - a container for optionally storing created physical volumes. It enables traversal of all physical volumes by the UI/user/etc. All solids should be registered with G4PhysicalVolumeStore, and removed on their destruction. It is intended principally for the UI browser.
G4VPhysicalVolume - a volume positioned within and relative to a given mother volume, and also represented by a given logical volume. They are optionally entered into the G4PhysicalVolumeStore.
G4PVPlacement - a physical volume corresponding to a single touchable detector element, positioned within and relative to a mother volume.
G4PVReplica - a physical volume representing many identically formed touchable detector elements, differing only in their positioning. The elements’ positions are determined by means of a simple formula, and the elements completely fill the containing mother volume.
G4PVParameterised - a physical volume representing many touchable detector elements differing in their positioning and dimensions. Both are calculated by means of a G4VParameterisation object. Each element’s position is calculated as per G4PVReplica, and each element’s shape can be modified by means of a user supplied formula.
G4VPVParameterisation - a parameterisation class able to compute the transformation and, indirectly, the dimensions of parameterised volumes, given a replication number.
G4SmartVoxelProxy - a class for proxying smart voxels. The class represents either a header (in turn referring to more VoxelProxies) or a node. If created as a node, calls to GetHeader cause an exception, and likewise GetNode when a header.
G4SmartVoxelHeader - represents a single axis of virtual division. Contains the individual divisions which are potentially further divided along different axes.
G4SmartVoxelNode - a single virtual division, containing the physical volumes inside its boundaries and those of its parents.
G4VoxelLimits - represents limitation/restrictions of space, where restrictions are only made perpendicular to the Cartesian axes.
G4SolidStore - a container for optionally storing created solids. It enables traversal of all/any solids by the UI/user/etc. The class is a “singleton”.
G4VSolid - position independent geometrical entities. They have only ‘shape’, and encompass both CSG and boundary representations. They are optionally entered into the G4SolidStore. This class defines, but does not implement, functions to compute distances to/from the shape. Functions are also defined to check whether a point is inside the shape, to return the surface normal of the shape at a given point, and to compute the extent of the shape.
G4VTouchable - a class that maintains a “reference” on a given touchable element of the detector - a kind of bookmark. It enables a given detector element to be saved during tracking (in case of Booleans/user code/etc.) and the corresponding G4PhysicalVolume retrieved later, with its “state” information (path through the tree) optionally restored so that navigation can be restarted. G4Touchables provide fast access to the transformation from the global reference system to that of the saved detector element.
G4TouchableHistory - object representing a touchable detector element, and its history in the geometrical hierarchy, including its net resultant local->global transform.
G4GRSSolid - object representing a touchable solid. It maintains the association between a solid and its net resultant local-to-global transform.
G4GRSVolume - object representing a touchable detector element. It maintains associations between a physical volume and its net resultant local-to-global transform.
G4AffineTransform - a class for geometric affine transformations. It supports efficient arbitrary rotation and transformation of vectors and the computation of compound and inverse transformations. A “rotation flag” is maintained internally for greater computational efficiency for transforms that do not involve rotation.
G4UserLimits - responsible for user limits on step size, ascribable to individual volumes.
Fig. 13 shows a general overview, in UML notation, of the geometry design. A detailed collection of class diagrams from the geometry category is found in the Appendix.
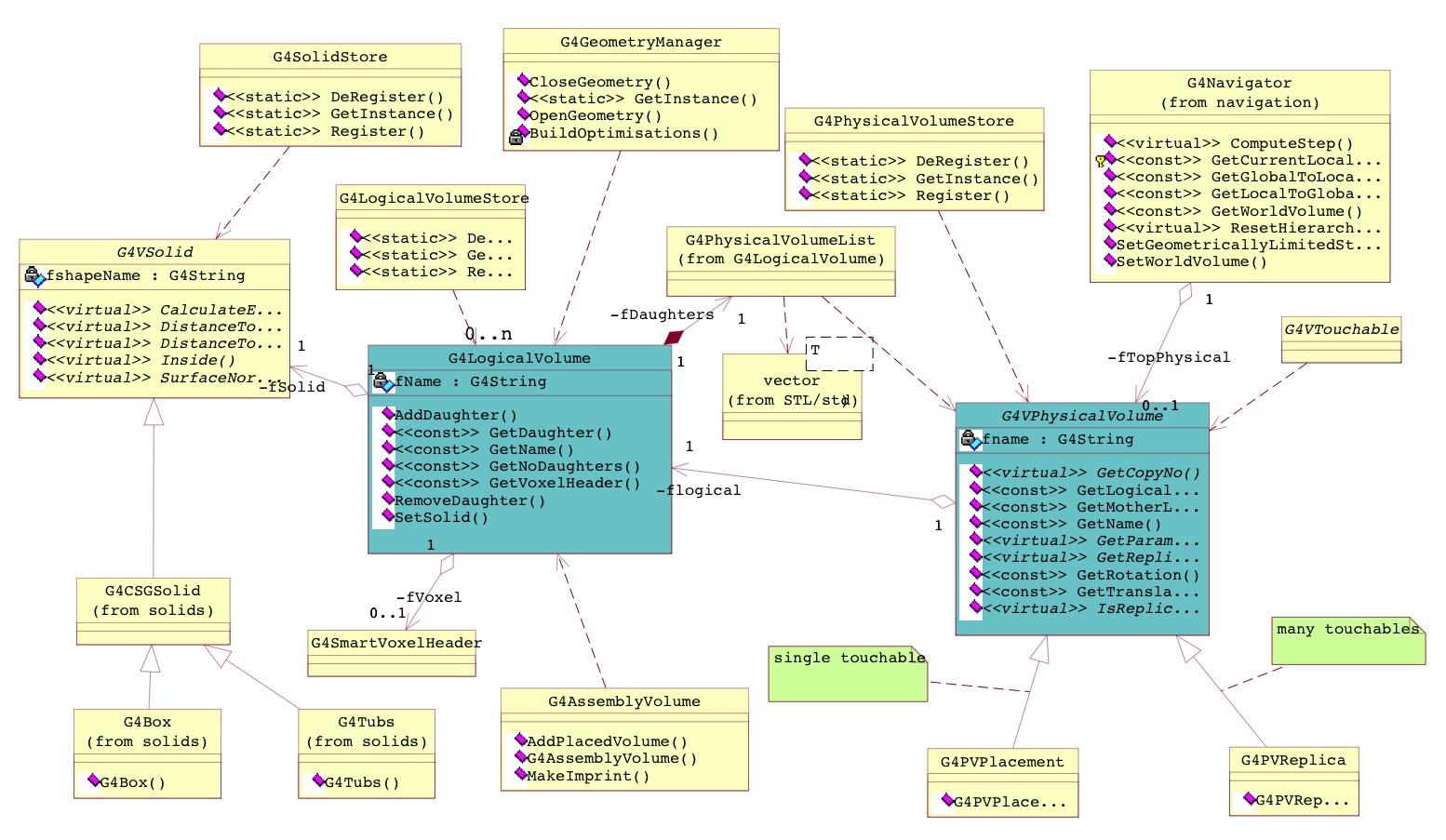
Fig. 13 Overview of the geometry.¶
Additional Geometry Diagrams¶
Additional diagrams for the object-oriented design of the ‘geometry’ related classes are included here. Fig. 14 shows the class diagram for smart voxels. Fig. 15 shows the class diagram for the navigator.
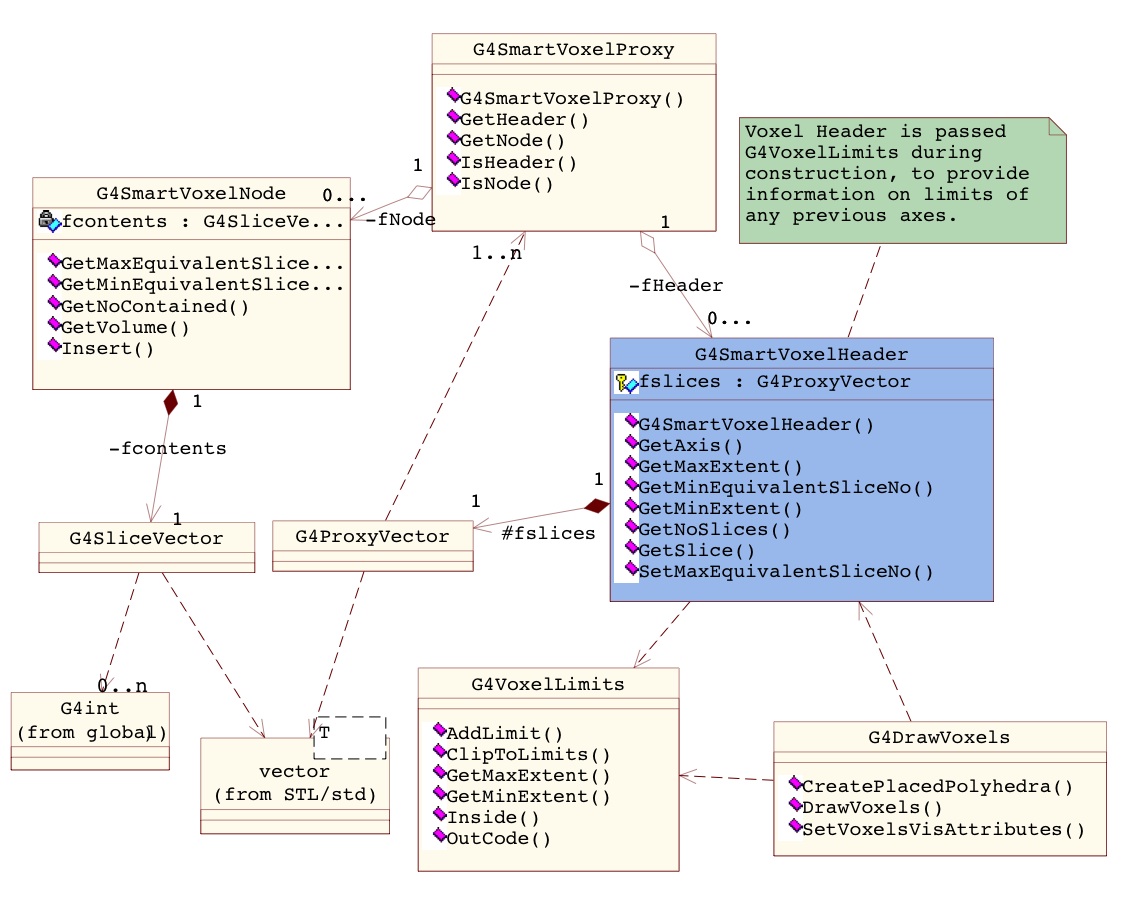
Fig. 14 Class diagram for smart voxels¶
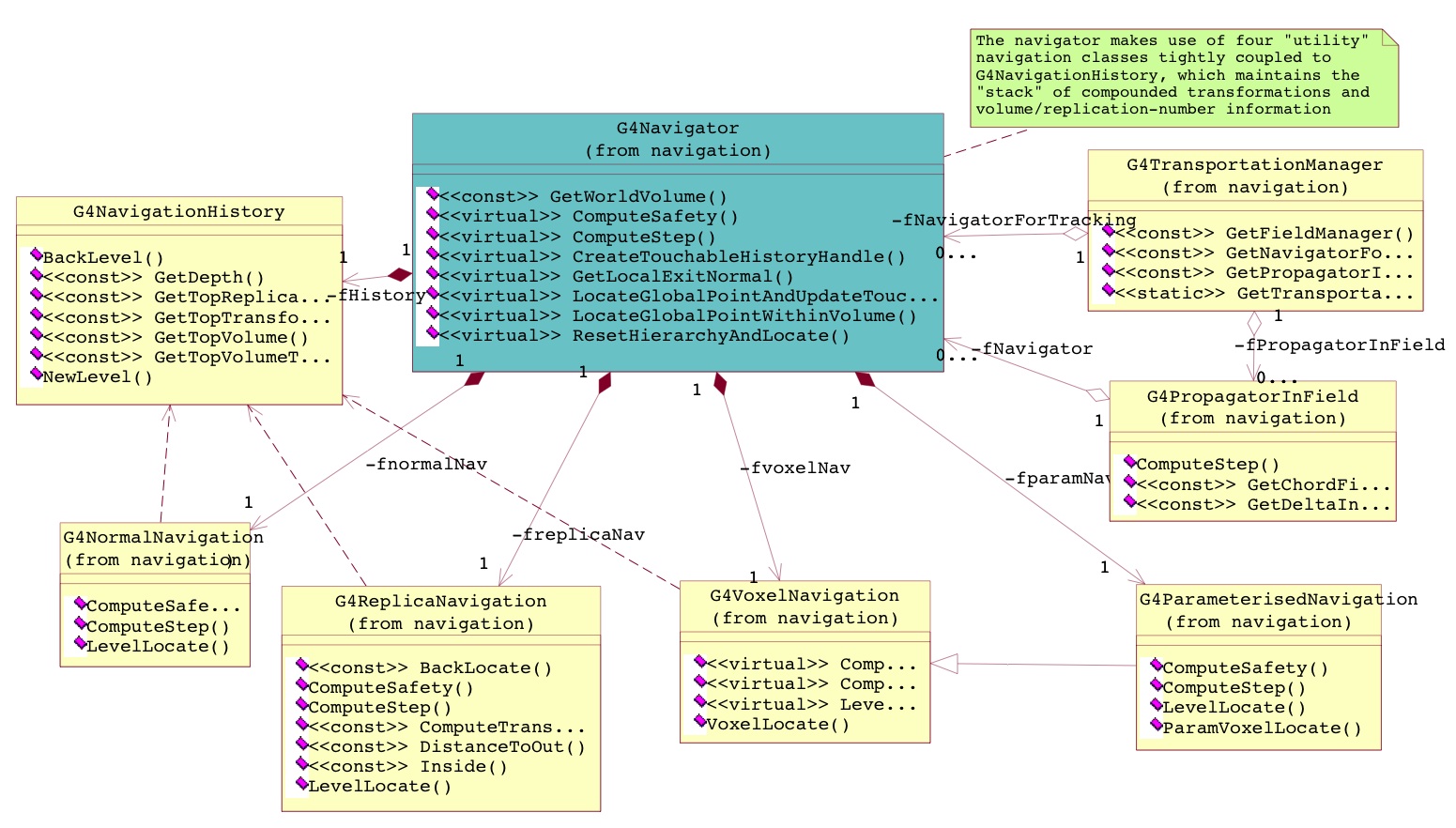
Fig. 15 Class diagram for the navigator¶